Los instrumentos de hierro en movimiento son el tipo más común de amperímetro y voltímetro que se utilizan en las frecuencias de potencia en los laboratorios. Estos instrumentos son muy precisos, económicos y resistentes en comparación con otros instrumentos de CA.
Índice de contenidos
Principio de funcionamiento de los instrumentos de hierro en movimiento:
En Moving Iron Instruments, una placa o furgón de hierro dulce o de acero de alta permeabilidad forma el elemento móvil del sistema. El furgón de hierro está situado de tal manera que puede moverse en el campo magnético producido por una bobina estacionaria. La siguiente figura muestra un instrumento simple de hierro en movimiento.
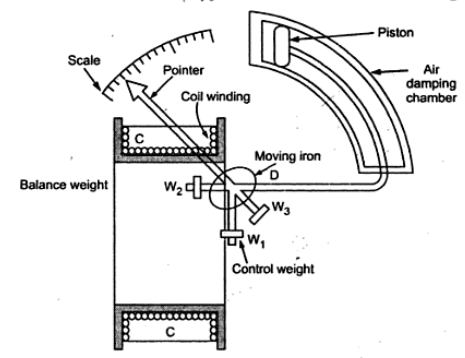
La bobina estacionaria es excitada por la corriente o el voltaje que se está midiendo. Cuando la bobina se excita, se convierte en un electroimán y la camioneta de hierro se mueve en la dirección de ofrecer un camino de baja reluctancia. Por lo tanto, la fuerza de atracción siempre se produce en una dirección para aumentar la inductancia de la bobina. Tenga en cuenta que a medida que la camioneta sigue el camino de baja reluctancia, el flujo neto en el entrehierro aumentará, lo que significa un mayor enlace de flujo de la bobina y, por lo tanto, aumentará la inductancia de la bobina. También se debe notar que la inductancia de la bobina es variable y depende de la posición de la camioneta de hierro.
Ecuación de par de instrumentos de hierro en movimiento:
Suponga que, en cualquier instante de tiempo, la corriente que fluye en la bobina es I. Por lo tanto, la energía almacenada en la bobina en forma de campo magnético = (1/2) LI2.
Tan pronto como la corriente cambia a (I+dI), la desviación en el puntero se convierte en dƟ, lo que da como resultado un cambio en la inductancia de la bobina de L a (L+dL). Deje que esta deflexión en el puntero se deba al par de deflexión Td.
Así trabajo mecánico realizado = Tdx dƟ ………………..(1)
Energía almacenada en bobina = (1/2)(L+dL)(I+dI)2
Cambio en la energía almacenada de la bobina
= Energía Final Almacenada – Energía Inicial Almacenada
= (1/2)(L+dL)(I+dI)2 – (1/2)LI2
= (1/2)[ (L+dL)(I+dI)2 – I2L]
= (1/2)[ (L+dL)(I2+2IdI+(dI)2 – I2L]
= (1/2)[ LI2+2LIdI+L(dI)2 + dLxI2+2IdIxdL+dLx(dI)2 – I2L]
Despreciando términos de segundo orden y superiores de cantidades diferenciales, es decir, L(dI)2, 2IdIxdL y dLx(dI)2
= (1/2)[ 2LIdI+dLxI2]
= LIdI +(1/2)dLx I2 ……………………(2)
Nuevamente, solo piense, cuando hay un cambio de corriente de I a (I+dI), este cambio de corriente debe ir acompañado de un cambio en la fem de la bobina. Así podemos escribir como
e = d(LI) / dt
= IdL/dt + LdI/dt
Pero energía eléctrica suministrada por la fuente = eIdt
= (IdL + LdI) x I
= I2dL + LIdI
De acuerdo con la ley de conservación de la energía, esta energía eléctrica suministrada por la fuente se convierte en energía almacenada en la bobina y se realiza trabajo mecánico para la desviación de la aguja de los instrumentos de hierro en movimiento.
Por eso,
I2dL + LIdI = Cambio en la energía almacenada + Trabajo realizado
⇒ I2dL + LIdI = LIdI +(1/2)dLx I2 + Tdx dƟ ….[from (1) and (2)]
⇒ Tdx dƟ = (1/2)dLxI2
⇒ Td = (1/2)I2(dL/dƟ)
Por lo tanto, el par de desviación en los instrumentos de hierro en movimiento se da como
Td = (1/2)I2(dL/dƟ)
A partir de la ecuación de torque anterior, observamos que el torque de desviación depende de la tasa de cambio de inductancia con la posición angular de la camioneta de hierro y el cuadrado de la corriente rms que fluye a través de la bobina.
En los instrumentos de hierro en movimiento, el par de control lo proporciona el resorte. El par de control debido al resorte se da como
Tc = KƟ
Donde K = constante de resorte
Ɵ = Deflexión en la aguja
En estado de equilibrio, el par de desviación y control será igual al siguiente.
Par de desviación = Par de control
⇒ Td = Tc
⇒ (1/2)I2(dL/dƟ) = KƟ
⇒ Ɵ = (1/2)(I2/K)(dL/dƟ)
De la ecuación de torque anterior, observamos que la desviación angular de la aguja de los instrumentos de hierro en movimiento es el cuadrado de la corriente rms que fluye a través de la bobina. Por lo tanto, la desviación de los instrumentos de hierro en movimiento es independiente de la dirección de la corriente.
Publicaciones relacionadas:
 Regla de división de voltaje: explicación, fórmula y derivación
Regla de división de voltaje: explicación, fórmula y derivación  Circuito CC
Circuito CC  Chanclas JK
Chanclas JK  Factor de paso o factor de amplitud de bobina y factor de bobinado
Factor de paso o factor de amplitud de bobina y factor de bobinado  Amperímetro
Amperímetro  Parámetro Y de la red de dos puertos
Parámetro Y de la red de dos puertos  ¿Cuántas baterías necesito para un panel solar de 200 vatios?
¿Cuántas baterías necesito para un panel solar de 200 vatios?  Carga de impedancia de sobretensión
Carga de impedancia de sobretensión  Regla de división actual: explicación, fórmula y derivación
Regla de división actual: explicación, fórmula y derivación  ¿Por qué los generadores de derivación de CC son autoprotectores contra cortocircuitos?
¿Por qué los generadores de derivación de CC son autoprotectores contra cortocircuitos? 