El factor significativo de diferenciación entre el motor paso a paso y el servomotor radica en la forma en que se construyen y controlan los dos. Los servomotores se consideran una alternativa al motor paso a paso cuando se considera un alto rendimiento.
Una de las diferencias cruciales entre un motor paso a paso y un servomotor es que un motor paso a paso posee una estructura bastante simple con una velocidad de operación baja en comparación con un servomotor.
Antes de entender más diferencias entre el motor paso a paso y el servomotor. Veamos primero –
¿Qué es Motor?
Un motor es considerado como un dispositivo electromecánico diseñado para transformar la energía eléctrica en energía mecánica equivalente. La energía eléctrica utilizada generalmente es suministrada por la batería y la energía mecánica convertida suele ser el movimiento de rotación que proporciona el motor.
Más simplemente, podemos decir que un motor es un dispositivo eléctrico que genera fuerza de rotación. Por lo tanto, el objetivo principal del motor paso a paso y servo es cambiar la señal eléctrica aplicada en velocidad angular o movimiento del eje.
Índice de contenidos
Gráfica comparativa
| Básico | El motor paso a paso funciona en pasos. | Es una máquina de funcionamiento continuo. |
| Configuración del sistema | Bucle abierto | Bucle cerrado |
| Requisitos de energía | Más | comparativamente menos |
| Diseño | Sencillo | Complejo |
| Capacidad de respuesta | Elevado | Comparativamente bajo |
| Costo | Barato | Caro |
| Fiabilidad | Más | Menos |
| Ruido y vibración | Elevado | comparativamente menos |
| Velocidad de operacion | Lento | Rápido |
| Mecanismo de retroalimentación | No existe | Existe |
| Generación de calor | Más | comparativamente menos |
| Número de polos | Generalmente 50 a 150 | Alrededor de 4 a 12 |
| Esperanza de vida | Más | Menos |
| Daños por sobrecarga | Menos propenso a sufrir daños. | Comparativamente más propenso a sufrir daños. |
| par producido | Elevado | Bajo |
| Eficiencia | Menos | Más |
| Tolerancia hacia el momento de inercia | Elevado | Bajo |
| Aplicaciones | En juegos, textiles, maquinarias de soldadura, equipos médicos y de impresión 3D, etc. | En robótica, sistemas de posicionamiento de antenas, puertas automáticas, cámaras, equipos de control remoto, etc. |
Definición de motor paso a paso
Un motor paso a paso es un motor sin escobillas diseñado para operar en varios pasos sin usar un mecanismo de retroalimentación. Su principio básico de funcionamiento es que tiene un rotor (que generalmente es un imán permanente) que gira discretamente cuando el estator (devanado) que está rodeado por el rotor se energiza externamente. La rotación es el resultado de la interacción magnética entre los polos del rotor y los polos del devanado del estator a los que se les proporciona excitación secuencial.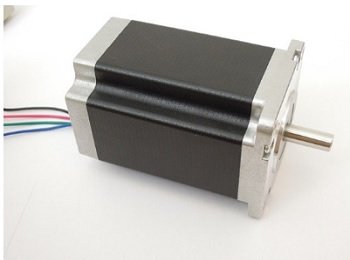
Por lo tanto, podemos decir que no hay un devanado eléctrico presente en el rotor del motor paso a paso, pero toma la energización proporcionada al devanado del estator como entrada, generando así una salida como rotación angular discreta. Esto se hace de manera que, al activarse el devanado, la corriente fluye secuencialmente, paso a paso, a través de ellos, magnetizando así el estator. Como resultado, se desarrollan polos electromagnéticos, por lo que se produce la propulsión dentro del motor.
Debido a tal capacidad, encuentra aplicaciones como actuadores en sistemas de control por computadora, sistemas de control digital, etc.
Definición de servomotor
Un servomotor se basa en el principio del servomecanismo y es un sistema de bucle cerrado que consta de varias unidades para hacer girar las piezas de la máquina con alta precisión. A diferencia del motor paso a paso, utiliza el mecanismo de retroalimentación que ofrece precisión angular por lo que podemos obtener la rotación deseada de acuerdo con la señal de entrada aplicada.
Básicamente, está construido de manera que su eje de salida se puede mover a un ángulo particular, una posición con una velocidad específica que no ofrece ningún motor normal.
Aquí, la señal eléctrica aplicada puede ser de naturaleza analógica o digital y esta señal aplicada corresponde a la cantidad de movimiento requerida para posicionar el eje. Como unidad de retroalimentación, se utiliza un codificador o un resolver que proporciona la información relacionada con la velocidad y la posición al controlador. La velocidad del motor varía en proporción al voltaje de entrada aplicado.
Diferencias clave entre motor paso a paso y servo
- los factor clave de la diferenciación entre el motor paso a paso y el servomotor radica en la forma en que se construyen y operan los dos. Un motor paso a paso utiliza una configuración de bucle abierto, por lo que no tiene un mecanismo de retroalimentación involucrado. Por el contrario, un servomotor se basa en una configuración de circuito cerrado en la que está involucrado un mecanismo de retroalimentación.
- En general, existen alrededor de 50 a 150 polos en el motor paso a paso. Mientras que el número de polos en el servomotor es de casi 4 a 12.
- los par producido en el motor paso a paso es comparativamente mayor que en el servomotor. Pero en un motor paso a paso, con un aumento de la velocidad, el par se reduce, mientras que incluso en funcionamiento a alta velocidad, el par producido no varía significativamente en los servos.
- Durante la operación, la cantidad de generación de calor es más en el motor paso a paso que en el servomotor.
- los esperanza de vida del servomotor es menor que la del motor paso a paso. La razón detrás de esto es que el motor paso a paso solo tiene cojinetes como su parte móvil, por lo tanto, el desgaste es menor, mientras que las escobillas del servomotor requieren reemplazo después de aproximadamente 2000 horas de uso.
- La ocurrencia de daño al motor debido a sobrecarga mecánica es menor en el caso de un motor paso a paso mientras que el servomotor presenta un mal funcionamiento severo debido a una sobrecarga mecánica.
- Para la misma operación, un servomotor requiere menos energía que un motor paso a paso.
- Los motores paso a paso se consideran comparativamente más de confianza que los servomotores debido al hecho de que la configuración de lazo abierto permite menos posibilidades de falla de operación que la configuración de lazo cerrado del servomotor.
- los velocidad de operacion que posee un motor paso a paso es de casi 1000 a 2000 rpm, mientras que el servomotor es de 3000 a 5000 rpm, que es bastante rápido.
- Un motor paso a paso es una máquina de bajo costo que un servomotor.
- los ruido y la vibración asociada con el motor paso a paso son más que el servomotor.
- La ausencia de un mecanismo de retroalimentación hace que el diseño del motor paso a paso bastante simple en comparación con el servomotor que es algo complejo en cuanto a diseño debido a la participación de un mecanismo de retroalimentación.
Conclusión
Esta discusión concluye que el servomotor ofrece una operación más eficiente que el motor paso a paso. Una de las principales razones de esto es la configuración de bucle cerrado del servomotor que utiliza señales de error para proporcionar un posicionamiento y un desplazamiento angular precisos.
Publicaciones relacionadas:
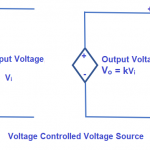 ¿Qué es la fuente de voltaje dependiente?
¿Qué es la fuente de voltaje dependiente?  Explicación del controlador de voltaje de CA monofásico
Explicación del controlador de voltaje de CA monofásico 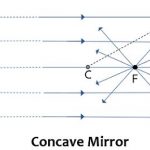 Diferencia entre espejo cóncavo y convexo
Diferencia entre espejo cóncavo y convexo 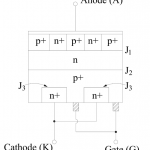 Gate Turn Off Thyristor (GTO) explicado
Gate Turn Off Thyristor (GTO) explicado  Diferencia entre RTD y termistor
Diferencia entre RTD y termistor  Zonas de Protección y Zona Muerta o Ciega en Sistema de Potencia
Zonas de Protección y Zona Muerta o Ciega en Sistema de Potencia  Magnetorresistencia
Magnetorresistencia  Métodos de medición
Métodos de medición  Explicación del número BCD o decimal codificado en binario
Explicación del número BCD o decimal codificado en binario  Arrancador de motor de CC de tres puntos
Arrancador de motor de CC de tres puntos  Filtrado Secuencial Cero en Protección Diferencial
Filtrado Secuencial Cero en Protección Diferencial
