En un sistema de circuito cerrado, la salida del sistema es retroalimentación a la entrada. El sistema de circuito cerrado controla el accionamiento eléctrico y el sistema se ajusta automáticamente. Se pueden proporcionar bucles de retroalimentación en un variador eléctrico para satisfacer los siguientes requisitos.
- Mejora de la velocidad de par
- Para mejorar la precisión en estado estacionario.
- Proteccion
Las partes principales del sistema de circuito cerrado son el controlador, el convertidor, el limitador de corriente, el sensor de corriente, etc. El convertidor convierte la frecuencia variable en frecuencia fija y viceversa. El limitador de corriente limita la corriente para que se eleve por encima del valor máximo establecido. Los diferentes tipos de configuración de bucle cerrado se explican a continuación.
Índice de contenidos
Control de límite de corriente
Este esquema se utiliza para limitar la corriente del convertidor y del motor por debajo de un límite seguro durante la operación transitoria. El sistema tiene un circuito de retroalimentación de corriente con un circuito lógico de umbral.
 El circuito lógico protege el sistema de una corriente máxima. Si la corriente se eleva por encima del valor máximo establecido debido a una operación transitoria, el circuito de retroalimentación se activa y fuerza a la corriente a permanecer por debajo del valor máximo. Cuando la corriente se vuelve normal, el circuito de retroalimentación permanece inactivo.
El circuito lógico protege el sistema de una corriente máxima. Si la corriente se eleva por encima del valor máximo establecido debido a una operación transitoria, el circuito de retroalimentación se activa y fuerza a la corriente a permanecer por debajo del valor máximo. Cuando la corriente se vuelve normal, el circuito de retroalimentación permanece inactivo.
Control de par de bucle cerrado
Estos tipos de bucles se utilizan en vehículos, raíles y trenes eléctricos que funcionan con baterías. El par de referencia T* se establece a través del acelerador, y este T* lo sigue el controlador de bucle y el motor. La velocidad de conducción se controla ejerciendo presión sobre el acelerador.
 Control de velocidad de circuito cerrado
Control de velocidad de circuito cerrado
El diagrama de bloques del sistema de control de velocidad de bucle cerrado se muestra en la siguiente figura. Este sistema utilizaba un lazo de control interno dentro de un lazo de velocidad externo. El lazo de control interno controla la corriente del motor y el par del motor por debajo de un límite seguro.
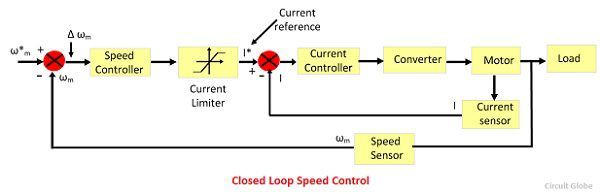 Considere una velocidad de referencia ω*m que produce un error positivo Δ ω*m. El error de velocidad se opera a través de un controlador de velocidad y se aplica a un limitador de corriente que se sobrecarga incluso con un pequeño error de velocidad. El limitador de corriente establece la corriente para el bucle de control de corriente interno. Luego, el variador acelera, y cuando la velocidad del variador es igual a la velocidad deseada, entonces el par del motor es igual al par de la carga. Esto, disminuye la velocidad de referencia y produce un error de velocidad negativo.
Considere una velocidad de referencia ω*m que produce un error positivo Δ ω*m. El error de velocidad se opera a través de un controlador de velocidad y se aplica a un limitador de corriente que se sobrecarga incluso con un pequeño error de velocidad. El limitador de corriente establece la corriente para el bucle de control de corriente interno. Luego, el variador acelera, y cuando la velocidad del variador es igual a la velocidad deseada, entonces el par del motor es igual al par de la carga. Esto, disminuye la velocidad de referencia y produce un error de velocidad negativo.
Cuando el limitador de corriente se satura, la unidad se desacelera en modo de frenado. Cuando el limitador de corriente se desatura, el accionamiento se transfiere de frenado a motorización.
Control de velocidad de bucle cerrado de variadores de motor múltiples
En este tipo de accionamiento, la carga se comparte entre varios motores. En este sistema, cada sección tiene su propio motor que lleva la mayor parte de su carga. La clasificación del motor es diferente para los diferentes tipos de carga, pero todos los motores funcionan a la misma velocidad. Si el requisito de par de cada motor se cumple con su propio motor de accionamiento, entonces el eje de accionamiento debe llevar solo un pequeño par de sincronización.
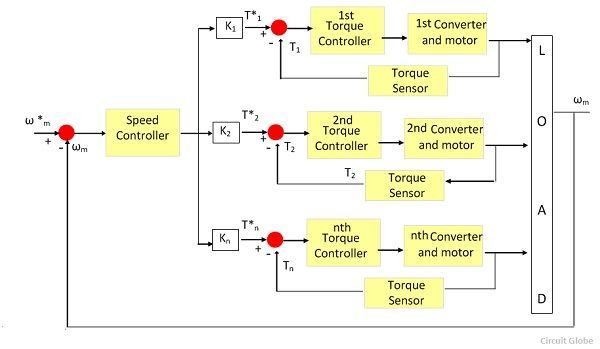 En una locomotora, debido a la diferente cantidad de desgaste, la rueda de la locomotora gira a diferentes velocidades. Por lo tanto, la velocidad de conducción del vehículo también varía. Junto con la velocidad, también es esencial que los pares se compartan por igual entre los distintos motores; de lo contrario, un motor está totalmente cargado y el otro está subcargado. Por lo tanto, el par nominal de la locomotora será menor que la suma del valor nominal del par motor individual.
En una locomotora, debido a la diferente cantidad de desgaste, la rueda de la locomotora gira a diferentes velocidades. Por lo tanto, la velocidad de conducción del vehículo también varía. Junto con la velocidad, también es esencial que los pares se compartan por igual entre los distintos motores; de lo contrario, un motor está totalmente cargado y el otro está subcargado. Por lo tanto, el par nominal de la locomotora será menor que la suma del valor nominal del par motor individual.
Publicaciones relacionadas:
 ¿Qué es la fuente de voltaje dependiente?
¿Qué es la fuente de voltaje dependiente?  Explicación del controlador de voltaje de CA monofásico
Explicación del controlador de voltaje de CA monofásico  Diferencia entre espejo cóncavo y convexo
Diferencia entre espejo cóncavo y convexo  Gate Turn Off Thyristor (GTO) explicado
Gate Turn Off Thyristor (GTO) explicado  Diferencia entre RTD y termistor
Diferencia entre RTD y termistor  Zonas de Protección y Zona Muerta o Ciega en Sistema de Potencia
Zonas de Protección y Zona Muerta o Ciega en Sistema de Potencia  Magnetorresistencia
Magnetorresistencia  Métodos de medición
Métodos de medición  Explicación del número BCD o decimal codificado en binario
Explicación del número BCD o decimal codificado en binario  Arrancador de motor de CC de tres puntos
Arrancador de motor de CC de tres puntos  Filtrado Secuencial Cero en Protección Diferencial
Filtrado Secuencial Cero en Protección Diferencial
