El frenado es el proceso de reducción de la velocidad de un motor de inducción. En el frenado, el motor funciona como un generador que desarrolla un par negativo que se opone al movimiento de un motor. El frenado de un motor de inducción se clasifica principalmente en tres tipos. Ellos son
- Frenado regenerativo
- Taponamiento o frenado de voltaje inverso
- Frenado dinámico
- Frenado dinámico de CA
- Frenado autodinámico
- Frenado dinámico CC
- Frenado de secuencia cero
A continuación se explica en detalle el frenado de un motor de inducción.
Índice de contenidos
1. Frenado regenerativo
La potencia de entrada del accionamiento del motor de inducción viene dada por la fórmula que se muestra a continuación
![]()
Donde φs es el ángulo de fase entre el voltaje de fase del estator y la corriente de fase del estator Is. Para funcionamiento motorizado, el ángulo de fase es siempre inferior a 90º. Si la velocidad del rotor se vuelve mayor que la velocidad síncrona, entonces la velocidad relativa entre el conductor del rotor y el campo giratorio del entrehierro se invierte.
Esta inversión del rotor induce la fem, la corriente del rotor y el componente de la corriente del estator que equilibra los giros de amperios del rotor. Cuando el φs es mayor que los 90º, entonces el flujo de potencia se invierte y da el frenado regenerativo. La corriente de magnetización produjo el flujo del entrehierro.
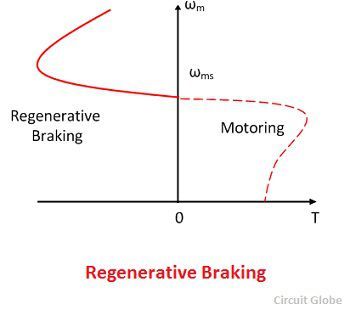
La naturaleza de la curva de par de velocidad se muestra en la figura anterior. Cuando la frecuencia de alimentación es fija, el frenado regenerativo solo es posible para velocidades superiores a la velocidad síncrona. Con una velocidad de frecuencia variable, no se puede obtener para una velocidad inferior a la velocidad síncrona.
La principal ventaja del frenado regenerativo es que la potencia generada se aprovecha al máximo. Y el principal inconveniente es que cuando se alimenta desde una fuente de frecuencia constante, el motor no puede emplear una velocidad sincrónica inferior.
2. Taponamiento
Cuando la secuencia de fase de alimentación del motor que funciona a velocidad se invierte intercambiando la conexión de cualquiera de las dos fases del estator en el terminal de alimentación, la operación cambia de motorización a conexión, como se muestra en la siguiente figura. El taponamiento es la extensión de la característica de motorización para una secuencia de fase negativa del tercer al segundo cuadrante. La inversión de la secuencia de fase invierte la dirección de un campo giratorio.

3. Frenado dinámico
- Frenado dinámico de CA: El frenado dinámico se obtiene cuando el motor funciona con suministro monofásico desconectando una fase de la fuente y dejándola abierta o conectándola con otra fase. Las dos conexiones se conocen respectivamente como conexión de dos y tres conductores.

Cuando se conecta a un suministro monofásico, se puede considerar que el motor está alimentado por un conjunto de voltaje trifásico de secuencia positiva y negativa. El par total producido por la máquina es la suma del par debido al voltaje de secuencia positiva y negativa. Cuando el rotor tiene alta resistencia, entonces el par neto es negativo y se obtiene la operación de frenado.
Suponga que la fase A del motor conectado en estrella está en circuito abierto. Entonces el flujo de corriente a través de la fase A se vuelve cero, es decir, Ia = 0 y la corriente a través de las otras dos fases es IB = – IC.
Las componentes de secuencia positiva y negativa Ip e In están representadas por la ecuación.

Donde α = ej20°
- Frenado autoexcitado mediante condensador – En este método, los tres condensadores están permanentemente conectados al motor. El valor del condensador se elige de modo que al desconectarse de la línea, el motor funcione como un generador de inducción autoexcitado. El proceso de conexión de frenado y autoexcitación se muestra en la siguiente figura.

La curva A es la curva de magnetización sin carga y la línea B representa la corriente a través del capacitor. E es la tensión inducida por el estator por fase de la línea. El condensador suministra la corriente reactiva necesaria para la excitación.
- Frenado dinámico de CC: En este método, el estator de inducción se conecta a través del suministro de CC. El método para obtener suministro de CC con la ayuda de un puente de diodos se muestra en la siguiente figura.


El flujo de corriente continua a través del estator produce un campo magnético estacionario, y el movimiento del rotor en este campo produce un voltaje inducido en los devanados estacionarios. Por lo tanto, la máquina funciona como un generador y la energía generada se disipa en la resistencia del circuito del rotor, dando así el devanado dinámico.

- Frenado de secuencia cero – En este frenado, las tres fases del estator están conectadas en serie a través de una sola fuente de CA o CC. Este tipo de conexión se conoce como conexión de secuencia cero porque la corriente en las tres fases es cofase. La naturaleza de la curva de velocidad-par para el suministro de CA y CC se muestra en la siguiente figura.
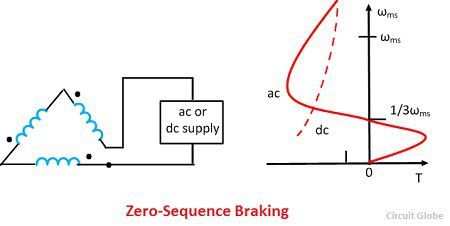
Con el suministro de CA, el frenado podría usarse solo hasta un tercio de la velocidad síncrona. El par de frenado producido por esta conexión es considerablemente mayor que el motor. Con el suministro de CC, el frenado está disponible en todo el rango de velocidad y el frenado es esencial para un frenado dinámico, ya que toda la energía generada se desperdicia en la resistencia del rotor.
Publicaciones relacionadas:
 ¿Qué es la fuente de voltaje dependiente?
¿Qué es la fuente de voltaje dependiente?  Explicación del controlador de voltaje de CA monofásico
Explicación del controlador de voltaje de CA monofásico  Diferencia entre espejo cóncavo y convexo
Diferencia entre espejo cóncavo y convexo  Gate Turn Off Thyristor (GTO) explicado
Gate Turn Off Thyristor (GTO) explicado  Diferencia entre RTD y termistor
Diferencia entre RTD y termistor  Circuito equivalente de un motor de inducción
Circuito equivalente de un motor de inducción  Métodos de conversión hexadecimal a binario y binario a hexadecimal Diferencia entre energía eléctrica y potencia eléctrica
Métodos de conversión hexadecimal a binario y binario a hexadecimal Diferencia entre energía eléctrica y potencia eléctrica  Diferencia entre potencia y par
Diferencia entre potencia y par  Sincroscopio Sincronizando
Sincroscopio Sincronizando

