Definición: El Sincro es un tipo de transductor cual transforma los angular posición del eje en una señal electrica. Se utiliza como un detector de errores y como un sensor de posición rotatorio. El error ocurre en el sistema debido a la desalineación del eje. El transmisor y el transformador de control son las dos partes principales del sincronizador.
Índice de contenidos
Tipos de sistemas Synchros
El sistema sincronizado es de dos tipos. Ellos son
- Tipo de control sincronizado.
- Sincronización de tipo de transmisión de par.
Sincronizadores de tipo de transmisión de par
Este tipo de sincronizadores tiene un par de salida pequeño y, por lo tanto, se utilizan para hacer funcionar la carga muy ligera como un puntero. El tipo de control Synchro se utiliza para conducir grandes cargas.
Sistema de sincronización de tipo de control
Los controles sincronizados se utilizan para la detección de errores en los sistemas de control posicional. Sus sistemas constan de dos unidades. Ellos son
- Transmisor sincronizado
- Receptor sincronizado
El sincronizador siempre trabaja con estas dos partes. La explicación detallada del transmisor y receptor sincronizados se da a continuación.
Transmisor sincronizado – Su construcción es similar al alternador trifásico. El estator de los sincronizadores es de acero para reducir las pérdidas de hierro. El estator está ranurado para albergar los devanados trifásicos. El eje del devanado del estator se mantiene separado 120º entre sí.

El voltaje de CA se aplica al rotor del transmisor y se expresa como
![]()
Donde Vr – valor eficaz de la tensión del rotor
ωc – frecuencia portadora
Las bobinas de los devanados del estator están conectadas en estrella. El rotor de los sincronizadores tiene forma de mancuerna y una bobina concéntrica está enrollada en él. El voltaje de CA se aplica al rotor con la ayuda de anillos deslizantes. La característica de construcción de los sincros se muestra en la siguiente figura.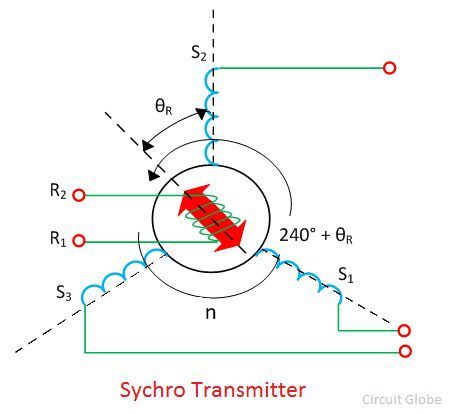
Considere que el voltaje se aplica al rotor del transmisor como se muestra en la figura anterior. 
El voltaje aplicado al rotor induce la corriente magnetizante y un flujo alterno a lo largo de su eje. El voltaje se induce en el devanado del estator debido a la inducción mutua entre el rotor y el flujo del estator. El flujo enlazado en el devanado del estator es igual al coseno del ángulo entre el rotor y el estator. El voltaje se induce en el devanado del estator.
Sean Vs1, Vs2, Vs3 los voltajes generados en los devanados del estator S1, S2 y S3 respectivamente. La siguiente figura muestra la posición del rotor del transmisor sincronizado. El eje del rotor forma un ángulo θr con respecto a los devanados del estator S2.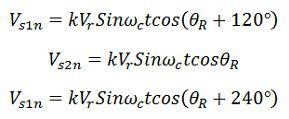
Los tres terminales de los devanados del estator son
La variación del eje terminal del estator con respecto al rotor se muestra en la siguiente figura.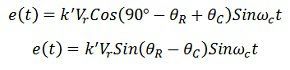
Cuando el ángulo del rotor llega a ser cero, la corriente máxima se produce en los devanados del estator S2. La posición cero del rotor se utiliza como referencia para determinar la posición angular del rotor.
La salida del transmisor se entrega al devanado del estator del transformador de control que se muestra en la figura anterior.
La corriente del mismo y la magnitud fluyen a través del transmisor y transformador de control de los sincronizadores. Debido a la corriente circulante, el flujo se establece entre el flujo del entrehierro del transformador de control.
El eje de flujo del transformador de control y el transmisor están alineados en la misma posición. El voltaje generado por el rotor del transformador de control es igual al coseno del ángulo entre los rotores del transmisor y el controlador. El voltaje se da como![]()
Donde φ – desplazamiento angular entre los ejes del rotor del transmisor y el controlador.
Φ – 90º el eje entre el rotor del transmisor y el transformador de control es perpendicular entre sí. La figura anterior muestra la posición cero del rotor del transmisor y el receptor.
Considere la posición del rotor y el transmisor está cambiando en la misma dirección. Un ángulo θR desvía el rotor del transmisor y el del transformador de control se mantiene θC. La separación angular total entre los rotores es Φ = (90º – θR + θC)
El voltaje del terminal del rotor del transformador Synchro se da como
El pequeño desplazamiento angular entre la posición de su rotor se da como
Sin (θR – θC) = (θR – θC)
Al sustituir el valor del desplazamiento angular en la ecuación (1) obtenemos
![]()
El transmisor sincronizado y el transformador de control se utilizan juntos para detectar el error. La ecuación de voltaje que se muestra arriba es igual a la posición del eje de los rotores del transformador de control y el transmisor.
La señal de error se aplica al amplificador diferencial que da entrada al servomotor. El engranaje del servomotor hace girar el rotor del transformador de control.
La figura anterior muestra la salida del detector de error de sincronización, que es una señal modulada. La onda de modulación anterior muestra la desalineación entre la posición del rotor y la onda portadora.![]()
Donde Ks es el detector de errores.
Publicaciones relacionadas:
 Barra colectora eléctrica y sus tipos
Barra colectora eléctrica y sus tipos  Fuente de corriente ideal y fuente de corriente práctica explicada
Fuente de corriente ideal y fuente de corriente práctica explicada  Diferencia entre motor síncrono y asíncrono
Diferencia entre motor síncrono y asíncrono  Método de dos vatímetros: medición de potencia trifásica
Método de dos vatímetros: medición de potencia trifásica  Diferencia entre electrolitos y no electrolitos
Diferencia entre electrolitos y no electrolitos  ¿Por qué el devanado del inducido en el estator en una máquina síncrona?
¿Por qué el devanado del inducido en el estator en una máquina síncrona? 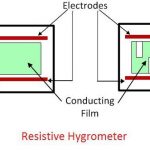 Higrómetro
Higrómetro 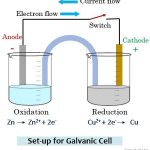 Diferencia entre ánodo y cátodo
Diferencia entre ánodo y cátodo
