El control de velocidad del motor BLDC es esencial para hacer que el motor funcione a la velocidad deseada. La velocidad de un motor de CC sin escobillas se puede controlar controlando la tensión/corriente de CC de entrada. Cuanto mayor sea el voltaje más es la velocidad.
Se han utilizado muchos algoritmos de control diferentes para controlar los motores BLDC. El voltaje del motor se controla mediante un transistor de potencia que funciona como un regulador de voltaje lineal. Esto no es práctico cuando se manejan motores de mayor potencia. Los motores de alta potencia deben usar control PWM y requieren un microcontrolador para proporcionar funciones de arranque y control.

El algoritmo de control debe proporcionar tres cosas:
- Voltaje PWM para controlar la velocidad del motor
- Mecanismo para conmutar el motor.
- Método para estimar la posición del rotor utilizando los sensores Hall o EMF posterior
La modulación de ancho de pulso se utiliza para aplicar un voltaje variable a los devanados del motor. El voltaje efectivo es proporcional al ciclo de trabajo PWM. Cuando se conmuta correctamente, las características de par-velocidad del motor BLDC son idénticas a las de un motor de CC. El voltaje variable se puede utilizar para controlar la velocidad del motor y el par disponible.
La conmutación de los transistores de potencia energiza los devanados apropiados en el estator para generar un par óptimo dependiendo de la posición del rotor. En un motor BLDC, la MCU debe conocer la posición del rotor y conmutar en el momento apropiado.
El control de velocidad puede ser de bucle cerrado o de bucle abierto.
Control de velocidad de bucle abierto – Implica simplemente controlar el voltaje de CC aplicado a los terminales del motor cortando el voltaje de CC. Sin embargo, esto da como resultado alguna forma de limitación de corriente.
Control de velocidad de bucle cerrado – Implica el control de la tensión de alimentación de entrada a través de la realimentación de velocidad del motor. Por tanto, la tensión de alimentación se controla en función de la señal de error. El control de velocidad de bucle cerrado consta de tres componentes básicos.
Un circuito PWM para generar los pulsos pwm requeridos. Puede ser un microcontrolador o un temporizador IC.
Un dispositivo de detección para detectar la velocidad real del motor. Puede ser un sensor de efecto hall, un sensor de infrarrojos o un codificador óptico.
Índice de contenidos
Conmutación trapezoidal del motor BLDC:
Uno de los métodos más simples de control para motores de CC sin escobillas utiliza lo que se denomina conmutación trapezoidal. En este esquema, la corriente se controla a través de los terminales del motor, un par a la vez, con el tercer terminal del motor siempre eléctricamente desconectado de la fuente de alimentación.
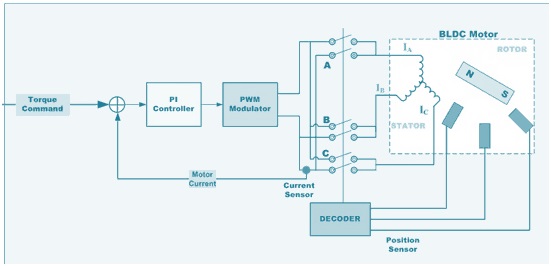
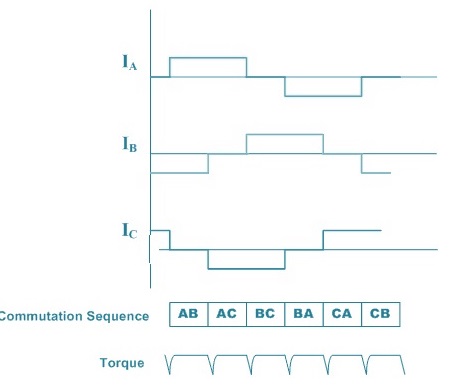
Los tres dispositivos Hall integrados en el motor se utilizan normalmente para proporcionar señales digitales que miden la posición del rotor dentro de sectores de 60 grados y proporcionan esta información al controlador del motor. Debido a que, en cualquier momento, las corrientes en dos de los devanados son de igual magnitud y el tercero es cero, este método solo puede producir vectores espaciales de corriente que tienen una de seis direcciones diferentes. A medida que el motor gira, la corriente que va a los terminales del motor se conmuta (conmuta) eléctricamente cada 60 grados de rotación, de modo que el vector espacial de la corriente esté siempre dentro de los 30 grados más cercanos a la dirección de cuadratura. La forma de onda de corriente para cada devanado es, por lo tanto, una escalera de cero a corriente positiva, a cero y luego a corriente negativa. Esto produce un vector espacial actual que se aproxima a una rotación suave a medida que avanza entre seis direcciones distintas a medida que gira el rotor.
En aplicaciones de motores, como acondicionadores de aire y refrigeradores, el uso de sensores de efecto Hall no es una opción viable. Los sensores de EMF posterior que detectan el EMF posterior en el devanado no conectado se pueden usar para lograr los mismos resultados.
Los sistemas de accionamiento de corriente trapezoidal son populares debido a la simplicidad de sus circuitos de control, pero sufren un problema de ondulación del par durante la conmutación.
Conmutación sinusoidal para motores BDLC:
La conmutación trapezoidal es inadecuada para proporcionar un control suave y preciso del motor de los motores de CC sin escobillas, particularmente a bajas velocidades. La conmutación sinusoidal resuelve este problema.
Esto se debe a que el par producido en un motor trifásico sin escobillas (con una fuerza contraelectromotriz de onda sinusoidal) se define mediante la siguiente ecuación:
Torque del eje = Kt [IRSin(δ) + IY Sin(δ +120) + IB Sin(δ o+240)]
donde:
δ es el ángulo eléctrico del eje,
Kt es la constante de par del motor y
IR, IY e IB son las corrientes de fase.
Suponiendo corrientes de fase sinusoidales: IR = I0Sinδ; IY = I0Sen (δ +120); IB = I0Sen (δ +240)
Por lo tanto,
Torque del eje = 1.5I0xKt
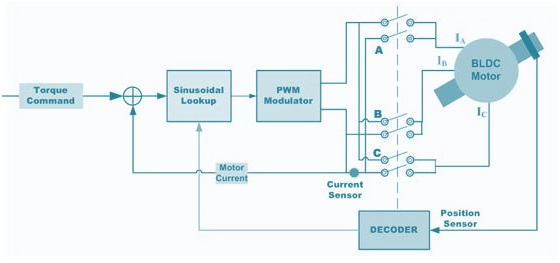
Los controladores de motor sin escobillas conmutados sinusoidales intentan impulsar los tres devanados del motor con tres corrientes que varían suave y sinusoidalmente a medida que gira el motor. Las fases relativas de estas corrientes se eligen de modo que den como resultado un vector espacial de corriente de rotación suave que siempre está en la dirección de cuadratura con respecto al rotor y tiene una magnitud constante. Esto elimina la ondulación del par y los picos de conmutación asociados con la conmutación trapezoidal.
La conmutación sinusoidal da como resultado una suavidad de control que generalmente no se puede lograr con la conmutación trapezoidal. Sin embargo, aunque es muy efectivo a bajas velocidades del motor, tiende a desmoronarse a altas velocidades del motor. Esto se debe a que, a medida que aumenta la velocidad, los controladores de bucle de corriente deben seguir una señal sinusoidal de frecuencia creciente. Al mismo tiempo, deben superar la fuerza contraelectromotriz del motor, que también aumenta en amplitud y frecuencia a medida que aumenta la velocidad.
Esta degradación continúa a medida que aumenta la velocidad. En algún momento, el cambio de fase de la corriente del motor cruza los 90 grados. Cuando esto sucede, el par se reduce a cero. Con la conmutación sinusoidal, las velocidades por encima de este punto dan como resultado un par negativo y, por lo tanto, no se pueden alcanzar.
¿Es un motor BLDC bidireccional?
Sí, porque los motores BLDC funcionan mediante conmutación electrónica. La conmutación electrónica significa que el campo magnético, al que el rotor tiende a alinearse, gira electrónicamente.
¡Gracias! Agregue algunos puntos nuevos escribiendo en el cuadro de comentarios, ya que ayudará más.
Publicaciones relacionadas:
 Diferencia entre comunicación en serie y en paralelo
Diferencia entre comunicación en serie y en paralelo  Efecto de proximidad: definición, causa y factores que afectan
Efecto de proximidad: definición, causa y factores que afectan  Máquina síncrona
Máquina síncrona  Eficiencia de cadena y factor de reducción de SCR
Eficiencia de cadena y factor de reducción de SCR  Prueba de corriente de fuga del tercer armónico del pararrayos
Prueba de corriente de fuga del tercer armónico del pararrayos  Sistema Numérico en Electrónica Digital
Sistema Numérico en Electrónica Digital  Fotodiodo
Fotodiodo  Esquema de protección del transformador
Esquema de protección del transformador  Frenado regenerativo
Frenado regenerativo  Par de tope
Par de tope  Frecuencia de resonancia
Frecuencia de resonancia
